Zaber Technologies: Sistema Custom Automatizzato per il trasferimento, il caricamento e la scansione di 25 piastre a pozzetti su microscopio Zaber Nucleus
I vantaggi dell'automazione di laboratorio sono ormai consolidati: maggiore produttività, tempi di automazione ridotti e maggiore accuratezza, coerenza e riproducibilità. Sebbene questi vantaggi siano spesso realizzati all'interno di singole stazioni di preparazione dei campioni, il trasferimento manuale dei campioni tra le stazioni limita i vantaggi in termini del risparmio di tempo offerto dalle apparecchiature ad alta velocità e aumenta il rischio di errore umano. Esistono soluzioni di automazione complete e pronte all'uso, ma possono essere costose e spesso richiedono che tutte le apparecchiature di laboratorio provengano da un unico fornitore, creando difficoltà per l’integrazione con apparecchiature diverse nei laboratori.
Il nostro partner scientifico Zaber Technologies ha recentemente sviluppato un sistema custom di caricamento automatico di piastre a pozzetto per il microscopio automatizzato Zaber Nucleus®.
Quello mostrato di seguito è un sistema demo che dimostra come una combinazione di hardware standard, insieme al software disponibile gratuitamente, possa realizzare un'automazione efficace e sorprendentemente pratica.
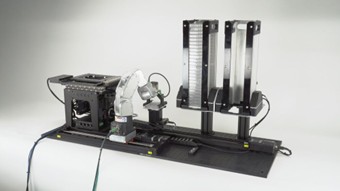
Figura 1. Sistema Custom per il trasferimento automatizzato di 25 piastre a pozzetti sottoposte a imaging mediante microscopia a fluorescenza con microcopio motorizzato Zaber Nucleus
Questa soluzione modulare ed economica, realizzata con dispositivi di movimento plug-and-play e facilmente personalizzabile, può anche essere facilmente adattata per integrare ulteriori stazioni di preparazione dei campioni, come etichettatura, scansione di codici a barre, centrifugazione e incubazione.
Progettazione di una soluzione custom e economica
L’obiettivo del sistema realizzato era quello di automatizzare un protocollo in cui 25 piastre da 96 pozzetti pre-preparate contenenti cellule in coltura e chiuse da coperchi erano state sottoposte a trattamento sperimentale e incubazione e dovevano essere sottoposte a imaging mediante microscopia a fluorescenza e poi riposte in un incubatore. Il sistema doveva essere compatto ed economico. La realizzazione di un sistema funzionale richiedeva sia l'hardware per il movimento delle piastre sia il software per il controllo di tali movimenti.
Flusso di lavoro per il trasferimento delle piastre
Per trasferire e scansionare automaticamente 25 micropiastre senza alcun intervento umano, Zaber ha progettato un sistema che integra due impilatori di piastre e due sottosistemi di trasferimento delle piastre stesse.
Hardware e software di controllo del movimento
Per lo scopo, sono stati utilizzati i dispositivi di posizionamento lineare e verticale della serie “X-“ plug-and-play di Zaber, dotati di motori, encoder e controller integrati. Questi dispositivi modulari condividono un'API (Application Programming Interface) comune, un software di controllo e configurazione e offrono supporto per i linguaggi d programmazione più utilizzati.
Per il caso specifico si è scelto Python come linguaggio di scripting. L'API Python di Zaber è ampiamente documentata e supportata da codici di esempio per una rapida programmazione dei dispositivi.
L'approccio aperto di Zaber per l'integrazione è in contrasto con molti produttori di strumenti per le scienze biologiche che limitano l'integrazione con hardware e software di terze parti. Questo approccio aperto ha permesso di integrare facilmente un braccio robotico a 6 assi Mecademic Meca500 per il carico e lo scarico delle piastre dal microscopio. I sei gradi di libertà del braccio consentono di gestire una varietà di materiali di consumo e contenitori all'interno di diverse apparecchiature, tra cui manipolatori di liquidi, impilatori e lettori di piastre. L'elevata ripetibilità dei dispositivi Zaber, inoltre, garantisce che le piastre arrivino sempre con una tolleranza di pochi μm rispetto alla stessa posizione ogni volta. Ciò semplifica notevolmente il controllo del sistema poiché in questo modo non è necessario alcun feedback esterno fornito da telecamere o altri sensori.
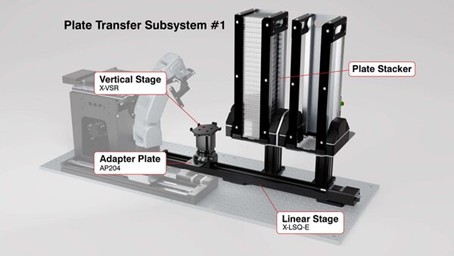
Figura 2. Sottosistema 1 di trasferimento delle piastre
Una coppia di torri per piastre custom è impiegata per impilare le nuove piastre da sottoporre a imaging e per il loro stoccaggio una volta completata la scansione. L'impilatore di input rilascia le nuove piastre e i relativi coperchi che vengono opportunamente allineati alla corretta posizione di carico sullo stage del microscopio durante il percorso di trasferimento. Al termine della scansione, questo sottosistema preleva nuovamente la piastra dal microscopio, la trasporta e la carica sull'impilatore di output. Per sollevare e abbassare le piastre dalle torri è stato selezionato lo stage verticale X-VSR per la sua elevata spinta, che consente di sollevare facilmente una pila completa di 25 piastre. Per la movimentazione dello stage verticale è stato selezionato lo stage lineare X-LSQ-E per la sua precisione, il basso costo e per il design aperto e senza ostacoli del carrello. Lo stage verticale è montato direttamente sul carrello dello stage lineare Zaber poiché i due dispositivi condividono un comune schema di fori di montaggio. Il porta-piastre sullo stage verticale è stato realizzato con stampa 3D.
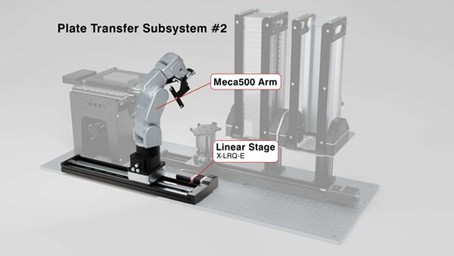
Figura 3. Sottosistema 2 di trasferimento delle piastre
Per prelevare le piastre dallo stage verticale e per le operazioni di carico-scarico dal microscopio, è stato selezionato il braccio robotico Meca500 per i suoi 6 gradi di libertà e per l'API Python che ha consentito di implementare uno scripting per il controllo del movimento coordinato e fluido con i dispositivi Zaber. Per estendere l'escursione del braccio è stato impiegato lo stage lineare Zaber X-LRQ-E in configurazione parallel-drive, cioè con motore parallelo all’asse di movimentazione, perché le sue dimensioni compatte si adattano meglio ai vincoli di spazio di un tipico sistema da banco. Anche il gripper del braccio robotico Meca500 è stato realizzato con stampa 3D.
Impilatori di piastre custom
Trovare impilatori di piastre convenienti si è rivelato sorprendentemente difficile. Sebbene gli impilatori di piastre integrati siano disponibili all'interno di sistemi più grandi e chiavi in mano, in genere non sono disponibili per l'acquisto come elementi separati. Per ovviare a questo sono stati realizzati elementi custom da parte del team di progettazione Zaber. Il team ha progettato un sistema di impilamento di piastre composto da due torri da 25 piastre ciascuna e da una base per l'erogazione e la ricezione delle piastre che vengono caricate manualmente dall'alto. Le torri contenenti le piastre sono rimovibili, facilitando il trasferimento di tutte le 25 piastre dentro e fuori da un incubatore. Il meccanismo alla base per il rilascio e la presa delle piastre è costituito da supporti lavorati. Il controller di processo Zaber X-SCA è stato impiegato per il controllo degli attuatori a solenoide che trattengono le pile di piastre. Poiché il controller utilizza lo stesso protocollo di controllo e le stesse API della Zaber Motion Library degli altri dispositivi Zaber, l'integrazione è stata semplice e veloce.
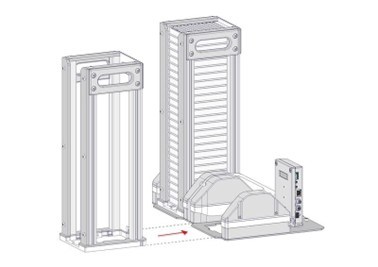
Figure 4. Le piastre a pozzetti possono essere caricate e rimosse in pochi secondi inserendo o rimuovendo le torri. Il controller e gli attuatori che azionano i meccanismi di rilascio e tenuta delle piastre sono integrati nella base.
Software di controllo
Per l’automazione del sistema e la sequenza di movimentazione delle piastre è stata utilizzata l'API Zaber Motion Library ed il linguaggio di programmazione Python. Si è scelto Python perché il codice è semplice da leggere e comprendere rendendolo un linguaggio accessibile anche a chi non è un programmatore professionista.
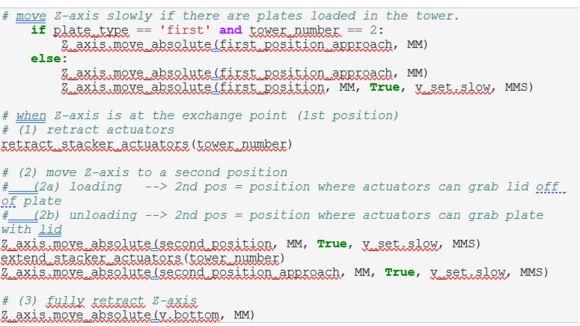
L'API Zaber Motion Library è ampiamente documentata e supportata da una libreria di utili codici di esempio, oltre a includere una guida introduttiva facile da seguire. Per la programmazione del braccio robotico è stata utilizzata la API Python Mecademic, che ha permesso il perfetto coordinamento dei dispositivi Zaber e Mecademic attraverso l’utilizzo dello stesso codice. Il workflow è stato implementato per velocizzare il sistema, consentendo la scansione di una piastra sul microscopio mentre la successiva viene prelevata dal carrello porta-piastre. Il codice Python scritto per questo sistema demo è disponibile di seguito.
Suggerimenti dagli esperti
Rallentare lo stage verticale durante la sequenza di avvicinamento alla torre porta-piastre offre le migliori prestazioni. Il movimento troppo rapido durante le operazioni di scambio può causare la caduta della piastra in fondo alla pila o del suo coperchio. La velocità raccomandata per questi movimenti è compresa tra 5 e 10 mm/s. Per tutti gli altri movimenti, invece, sono state impostate velocità >40 mm/s. Possono esserci piccole, ma significative, differenze dimensionali tra le piastre di diversi fornitori. Le piastre e i relativi coperchi possono avere spessori e forme diversi (in particolare i bordi sul fondo delle piastre). Si consiglia di testare le posizioni della sequenza di caricamento per garantire che le piastre possano essere caricate e scaricate correttamente dalle torri.
La scelta del metodo più adatto di presa e orientamento delle piastre dipenderà da come le piastre vengono caricate e rimosse dai vari sistemi. Ad esempio, lo stage XY del microscopio Nucleus MVR di Zaber è dotato di un sistema di caricamento a molla per la tenuta delle piastre a pozzetti e spesso le pinze per piastre a pozzetti hanno una presa laterale. Per questo motivo si è scelto di adottare una presa dall'alto tramite braccio robotico.
Risultati e conclusioni
Questo progetto dimostra che la realizzazione di un sistema automatizzato per la distribuzione, il trasporto, il caricamento e lo stoccaggio di micropiastre è più accessibile di quanto molti possano aspettarsi. Un'ampia gamma di dispositivi plug-and-play con controller integrato, supportati da strumenti software gratuiti, consente il rapido sviluppo di sistemi altamente affidabili. L'automazione della fase di movimentazione delle piastre tra le stazioni del sistema consente ai ricercatori di concentrarsi sui propri esperimenti e non sulle operazioni di gestione e caricamento dei campioni sul microscopio.
Sebbene questo setup sia stato realizzato per l’automazione di uno scenario applicativo specifico, lo stesso framework hardware e software può essere adattato a una varietà di casi in cui è richiesta l’automazione di laboratorio.
Inoltre, la flessibilità hardware e software offerta dal sistema ne permette l’evoluzione in funzione delle mutevoli esigenze sperimentali nel tempo.
Zaber Technologies progetta e realizza dispositivi di movimentazione motorizzata con elevata risoluzione e precisione di posizionamento per applicazioni in ambito della fotonica, dell’ottica, della microscopia e dell’automazione industriale. La vasta gamma dei prodotti Zaber comprende attuatori lineari, stage di traslazione, di rotazione e verticali, goniometri, grippers, mirror mount, stepper motor, controllers, filter wheels ed altri dispositivi per la realizzazione di sistemi motorizzati multi-assi e gantry modulari.
Stage lineari e di rotazione con capacità di carico fino a 500 Kg sono anche disponibili.
La Zaber Motion Library è una API open source che garantisce la perfetta integrazione per il controllo della movimentazione dei dispositivi Zaber che supporta i linguaggi di programmazione Python, MATLAB, C#, C++, JavaScript, Java e Octave su Windows, Linux, mac OS e Raspberry Pi. Per gli user LabView, inoltre, Zaber offre driver LabView certificati.
Per saperne di più clicca qui.
